






HolyBro H-RTK NEO-F9P
HolyBro H-RTK NEO-F9P
369 auf Lager
Verfügbarkeit für Abholungen konnte nicht geladen werden
Übersicht
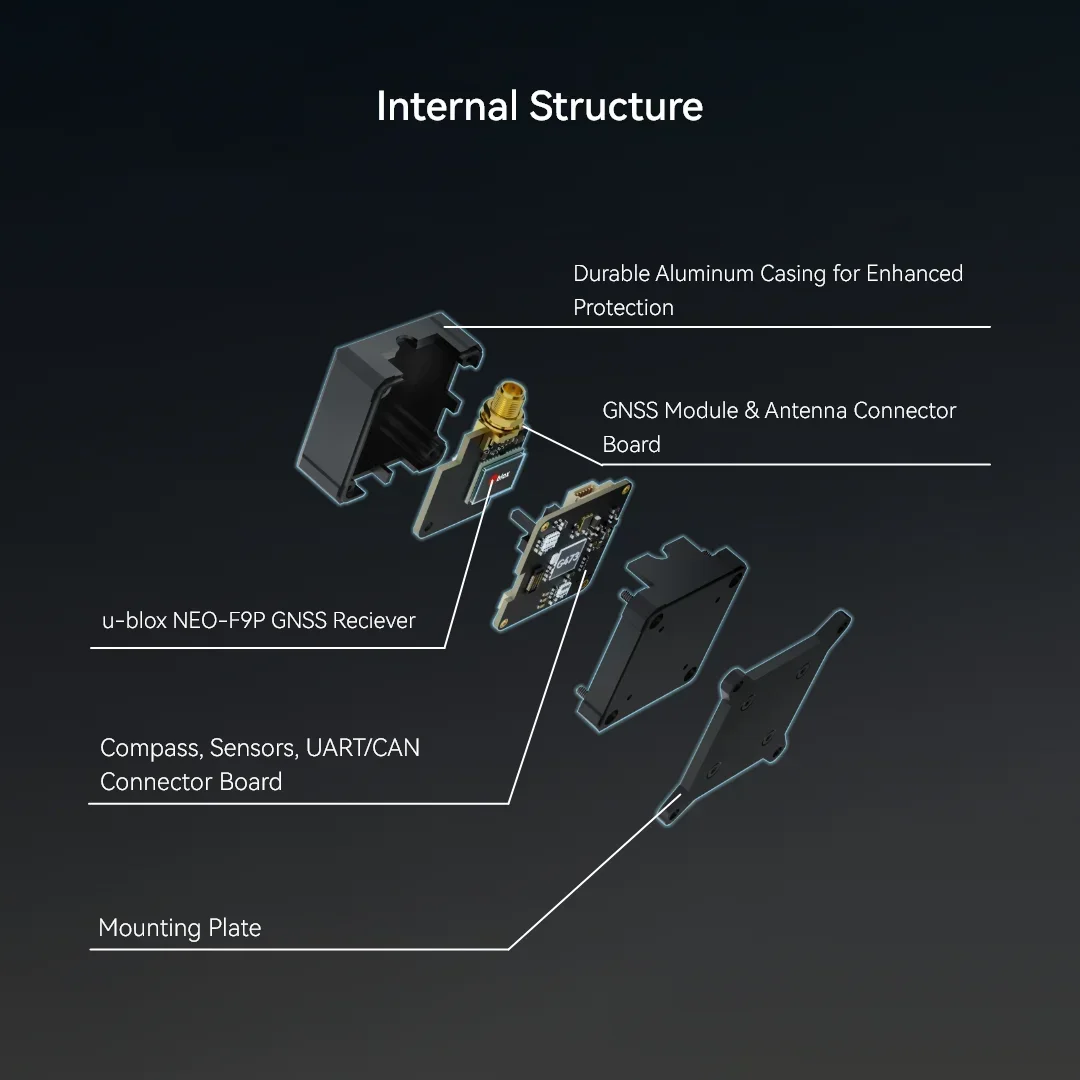
Das H-RTK NEO-F9P GPS integriert den fortschrittlichen u-blox NEO-F9P GNSS-Empfänger, einen hochpräzisen RM3100 Kompass und eine dreifarbige LED-Anzeige. Dieses hochpräzise System bietet Multiband-RTK-Funktionen mit schnellen Konvergenzzeiten, zuverlässiger Leistung und schnellen Aktualisierungsraten, was ideal für hochdynamische, hochvolumige Anwendungen ist, die eine zentimetergenaue Präzision erfordern. Es sind mehrere Antennenoptionen erhältlich, um verschiedenen Anwendungsfällen gerecht zu werden.
Es unterstützt den gleichzeitigen Empfang von GPS (L1 & L5), GLONASS, Galileo, BeiDou und QZSS-Signalen und bietet flexible Konnektivität in sowohl UART- als auch DroneCAN-Optionen. Die DroneCAN-Version enthält einen MCU, IMU und Barometer, die eine robuste Kommunikation und nahtlose Integration für fortschrittliche UAV-Systeme ermöglichen.
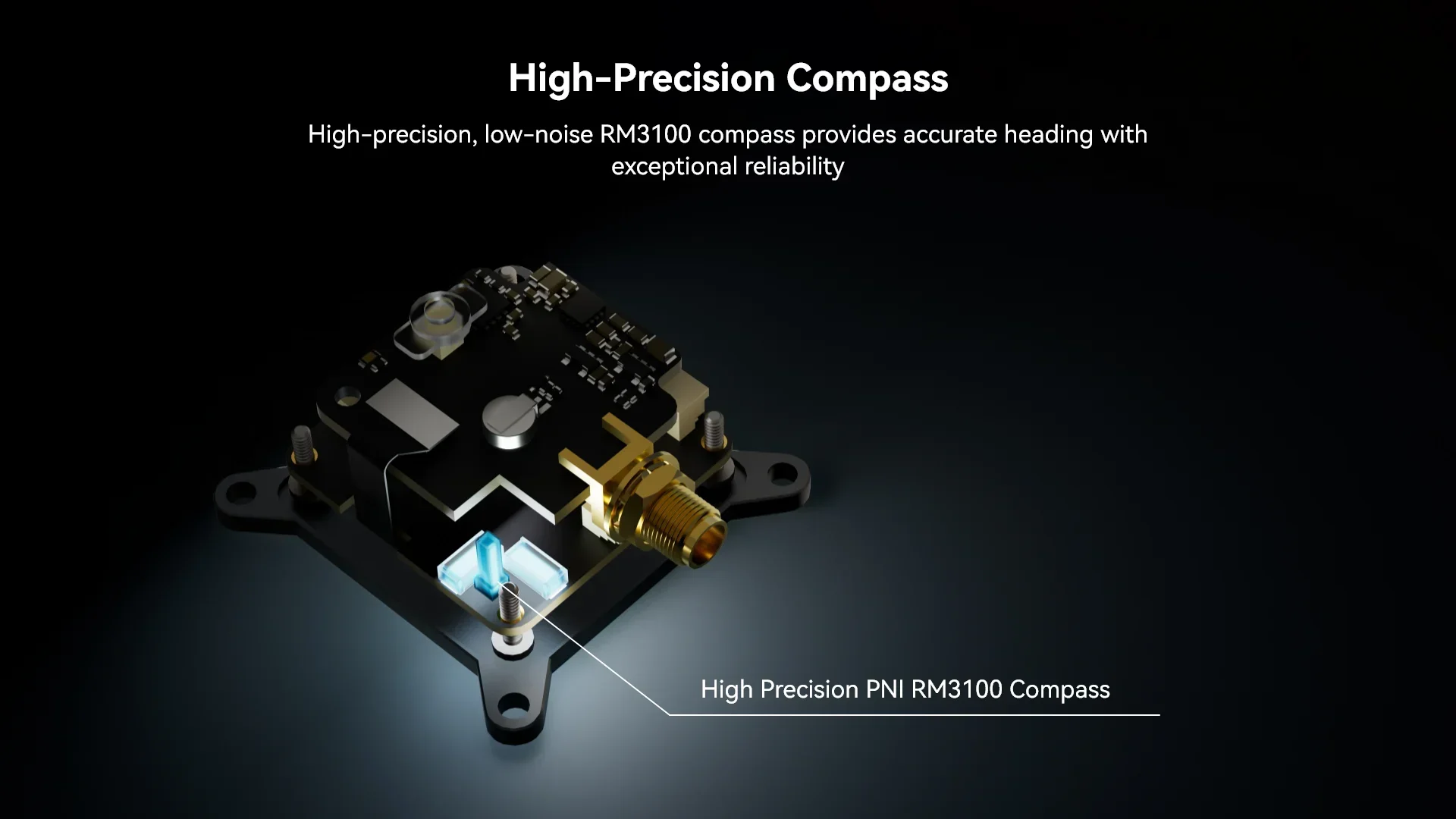
Der hochpräzise PNI RM3100 Kompass sorgt für eine genaue Ausrichtung und Stabilität mit außergewöhnlicher Zuverlässigkeit, wodurch er perfekt für anspruchsvolle UAV-Anwendungen ist. Er zeichnet sich durch hohe Auflösung, geringen Stromverbrauch, starke Rauschunterdrückung, einen breiten Dynamikbereich und hohe Abtastraten aus. Die Messungen sind temperaturstabil und von Natur aus frei von Offset-Drift.
Merkmale
Fortschrittlicher GNSS-Empfänger: Hochpräziser u-blox NEO-F9P GNSS-Empfänger mit zuverlässiger und stabiler Positionsbestimmung auf Zentimeterebene
Integrierter RM3100 Kompass: Genaue und stabile Ausrichtungsdaten
Schnelle RTK-Konvergenz: Fortschrittliche Mehrfrequenz-DGNSS-Algorithmen ermöglichen eine schnelle RTK-FixierungHigh-Gain-Antenne: Verbesserter Signalempfang über GNSS-Frequenzen hinweg
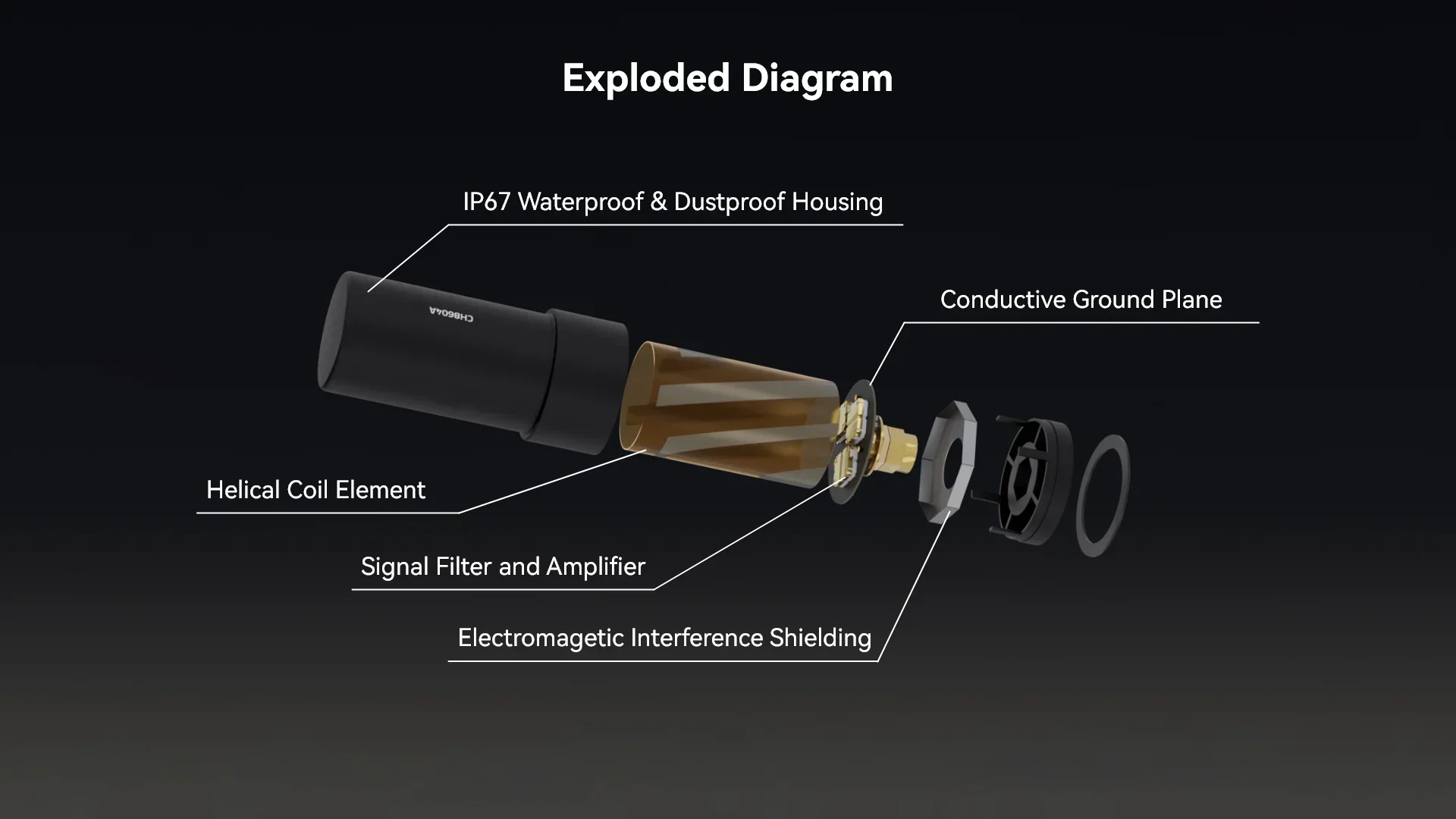
Fortschrittliche Filterung & Verstärkung: Hybrid-Koppler, SAW-Filter und LNA-Architektur liefern außergewöhnliche Signalstärke und effektive Interferenzunterdrückung
Vielseitige Installation: Mehrere Antennenoptionen bieten Flexibilität für verschiedene Situationen
DroneCAN-Option: Bietet MCU, IMU, Barometer und robuste Kommunikation für fortschrittliche UAV-Systeme



Spezifikation
Empfohlene Anwendung |
• Rover-Station (UAV, Marine, Landfahrzeug, etc.) |
• Rover-Station (UAV, Marine, Landfahrzeug, etc.) |
• Rover-Station (Marine, Landfahrzeug, etc.) |
GNSS-Empfänger |
u-blox NEO-F9P |
u-blox NEO-F9P |
u-blox NEO-F9P |
Prozessor |
STM32G473 (nur in DroneCAN-Version verfügbar) |
N/A |
|
IMU & Barometer |
ICM42688 & ICP20100 (nur in DroneCAN-Version verfügbar) |
N/A |
|
Antenne |
Helixantenne |
Hochpräzise vertikale Array Patch Antenne |
Hochleistungs-Keramikantenne |
Antennen-Spitzenverstärkung |
L1: 2dBi |
L1: 3,5dBi |
L1: 5,5dBi |
Antennen LNA-Verstärkung |
33 ± 2dB |
33 ± 2dB |
40 ± 2dB |
Magnetometer |
Hochpräzises PNI RM3100 |
||
GNSS |
BeiDou, Galileo, GLONASS, GPS / QZSS |
||
GNSS-Band |
B1I, B2I, E1B/C, E5b, L1C/A, L1OF, L2C, L2OF |
||
Anzahl der gleichzeitigen GNSS |
4 |
||
Dynamische Steuerkursgenauigkeit |
0,3 Grad |
||
Horizontale Positionierungsgenauigkeit |
PVT: 1,5 m CEP |
||
Vertikale Positionierungsgenauigkeit |
PVT: 2,0 m R50 |
||
Kommunikationsprotokoll |
UART oder DroneCAN 1 Mbit/s |
||
GNSS-Protokoll |
NMEA |
||
Zeit bis zur ersten Positionsbestimmung |
Heißstart: 3 s |
||
Navigationsaktualisierungsrate |
GPS+GLO+GAL+BDS: |
||
Anti-Spoofing |
Fortschrittliche Anti-Spoofing-Algorithmen |
||
Betriebsgrenzen |
Dynamik: ≤ 4 g |
||
Antennenanschlusstyp |
Platine: SMA-Buchse |
||
Betriebsspannung |
4,75 V ~ 5,25 V |
||
Betriebstemperatur |
-25℃ bis 85℃ |
||
Stromverbrauch |
~250 mA |
||
Antennenkabellänge |
40 cm (Standard) |
40 oder 80 cm |
500 cm |
Abmessungen |
Modul: 43,1×44,1×22 mm |
Modul: 43,1×44,1×22 mm |
Modul: 43,1×44,1×22 mm |
Gewicht |
Modul: 40 g |
Modul: 40 g |
Modul: 40 g |



Beispiel Schaltplan Referenz-Links
Referenz-Links
Benutzerhandbuch: Einrichtung & Erste Schritte (Ardupilot)
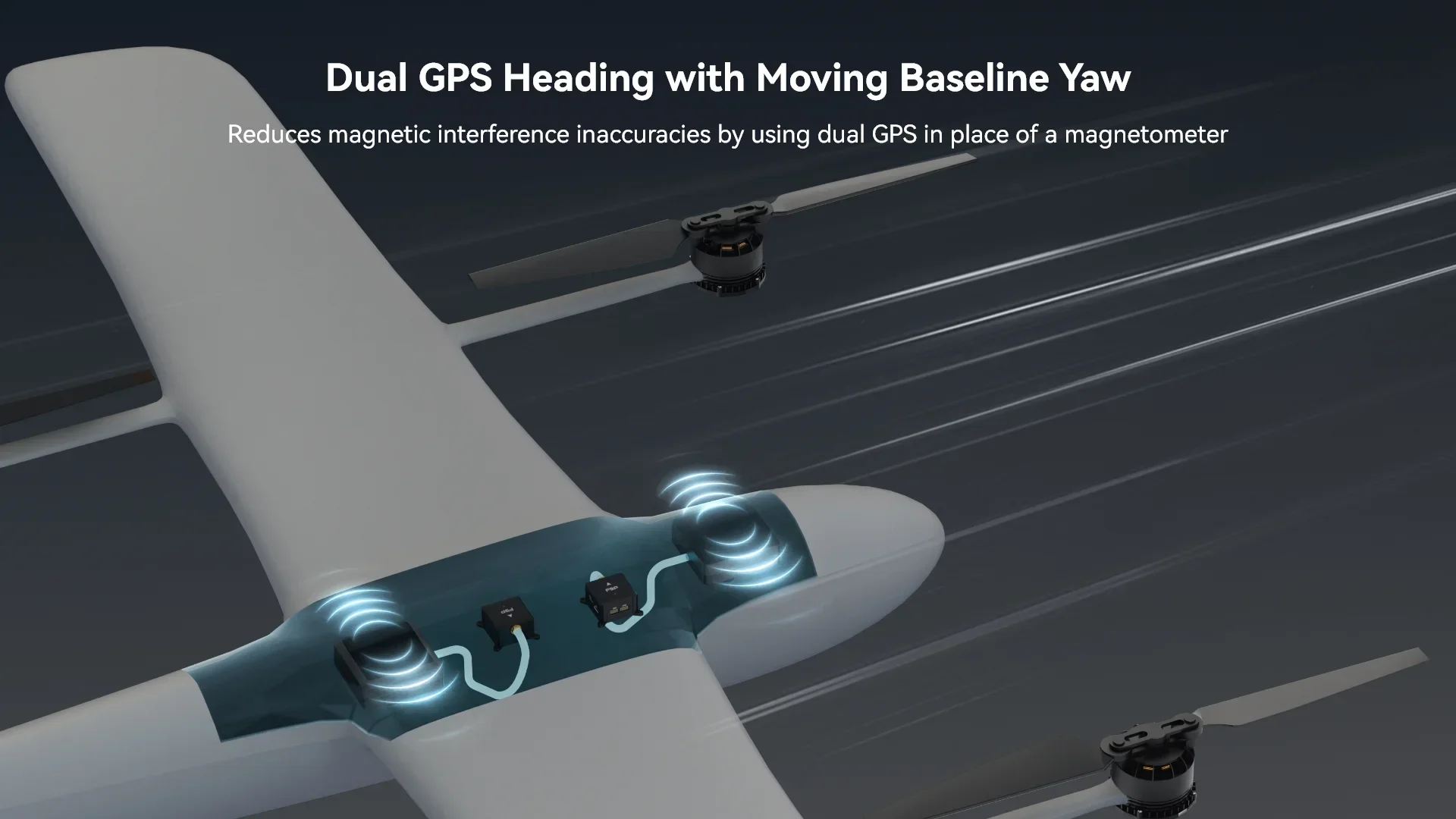
GPS-Kurs/Gier (auch bekannt als bewegliche Basislinie) Anleitung



















